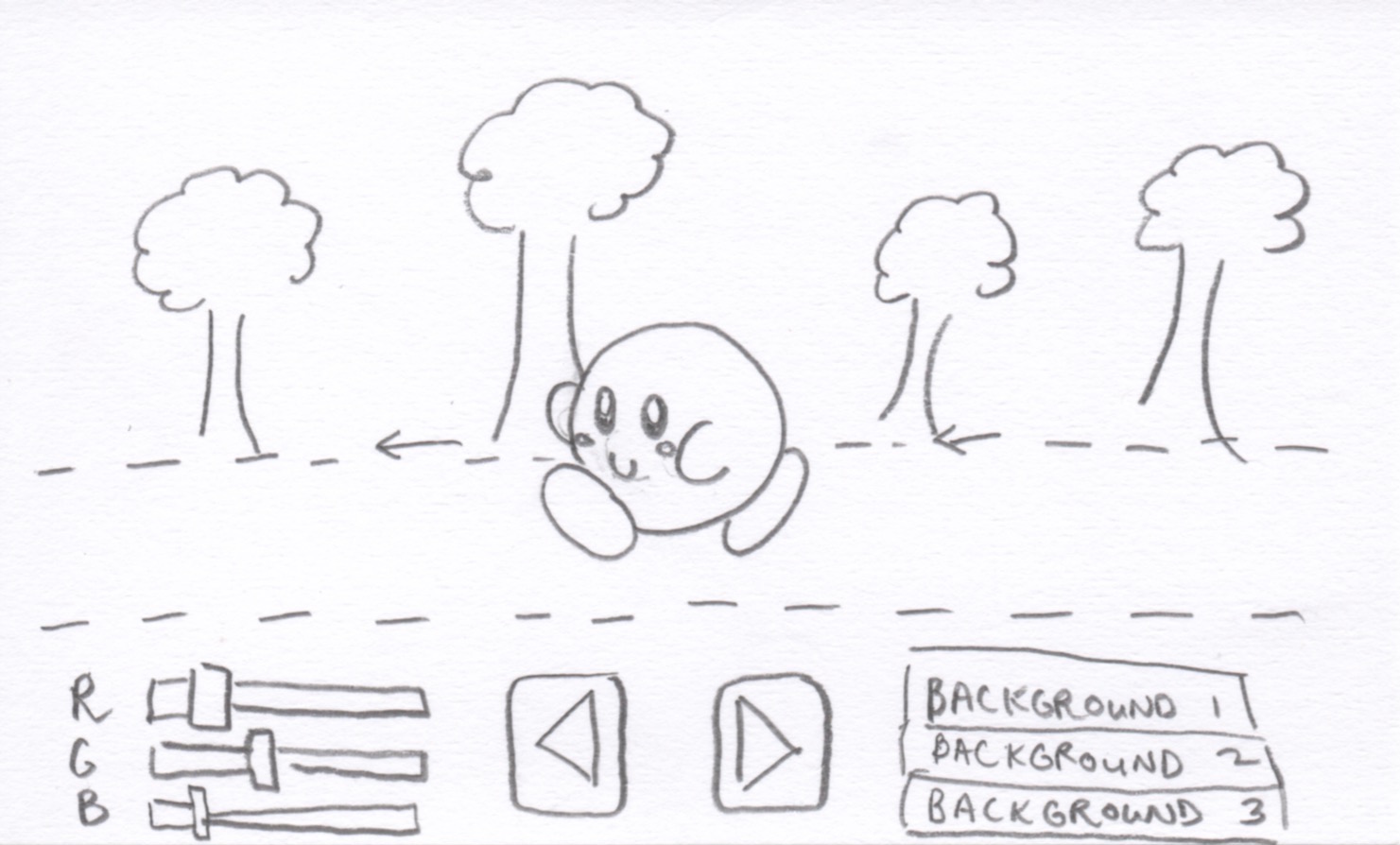
The final blog posts for these classes are always somewhat bittersweet. Today I'm presenting to you what we've been working on for weeks; the final MeArm UI. I highly recommend watching the video to see our robot in action, but since the UI itself may be hard to see in the video, here's an additional screenshot:
 |
| Want to see our UI in action firsthand? Download it here! But you'll need our MeArm for it to work... |
The interface itself may seem simple, but it took a lot of work to code and get looking just right. The biggest challenge in coding two interfaces side-by-side was locking all the buttons for one mode when the opposite mode was selected. In this way, we could participate in the events of the ROBOlympics without relying on the program we were given to start off with, while simultaneously having a UI catered to the purpose of our custom function. Personally, I wish I could have done more to make the UI more visually appealing, but time got the better of me; still, all the buttons worked as they were intended to in the end, and I think that in itself is quite the victory.
With the end of the semester and the end of our final project came the ROBOlympics, as I have mentions - a competition to see whose robot and UI in the class was the best of the best. There were four events, none of which we placed in the top three of... except for the Talent competition. As luck would have it, all the hard work we spent creating the crane game paid off, as we were able to manage third place by popular vote! Again, a small victory for Enzio and me.
In the end, though, our robot's talent wasn't enough to place in the top three of the entire competition overall. Or the top four. Or five. Or six. Yes, of seven different robot UI pairings, our humble little robot placed seventh - dead last. But really, what can I say? We worked our butts off on this thing, and I'm still incredibly proud of what we were able to create.
Where will I go from here? In a year, I'll be graduating from Cardinal Stritch with a Bachelor's degree in Computer Science, and even sooner next Fall, I hope to land a solid internship in the Computer Science field. Honestly, I don't know what the future holds for me - have I learned enough to make my debut in the working world, doing what I love to do (programming)? Or will I be thrust into an environment where, to my horror, I find that I simply don't have what it takes? I can't say for sure; all I can do is keep my head held high and hope for the best.
Paige Ruka